
Motivated to Build an Electric Car!
I recently started my final project for my embedded systems course in the Winter 2018 term of college. I knew immediately that I wanted to build some sort of autonomous car. While the innovator in me realized how many spin off projects I could have in robotics and machine learning from just this one project, I must also admit that a recent fascination with classic cars certainly helped sway me as well!
I find this to be slightly contradictory actually. Having never driven a classic car myself, I am aware that much of the enjoyment stems from being one with the machine. From feeling the rumble of the engine under your foot to orchestrating the the transmission of the car, the experience is one of raw power. Classic cars simply wouldn’t be what they are if we weren’t the ones in control of that power! So this is what I find to be contradictory: a man that wants to enjoy power while spending every day discovering how to relinquish it!
My end goal isn’t to make it into the autonomous car industry. I am much more fascinated in autonomy in situations where humans are simply not able to perform the task. Many examples in the aerospace industry arise, and this is where I’ve set my gaze for the time being. But before I work on rockets, if I ever get the change, I’ll start where many have started before me: a simple remote controlled car!
The Project Proposal
For the scope of this project I would like to build the foundation of a remote control car and introduce some aspects of autonomy. The car will be remotely controlled by a joystick and four DC motors. To begin, the joystick may be wired to the car necessitating the driver to follow the car around. Once the mechanics are working, I will introduce the nrf24l01 transceivers so that the car can be remotely controlled. Finally, I would like to add an automatic braking system into the car using an Ultrasonic sensor. This feature should prevent the driver from having a head on collision with any obstacles.
Components
- The course requires that I use the Atmega 1284 micro-controllers.
- That wasn’t a complaint at all. While I’ve read up on the importance of Arduinos in prototyping, I’m much more interested in getting my hands dirty with some serious hardware, the stuff that’s actually used in industry.
- So if anyone that’s reading this sees that I’m using an “inferior” product in their eyes or that maybe I could enhance my learning by using some other piece of hardware, please let me know.
- Joystick for dictating the car’s speed and direction.
- L2930 H-Bridge Motor Driver for communicating with the motors.
- 6V DC Motors with built in gearboxes.
- HC-SR04 Ultrasonic sensor for detecting obstacles.
- nrf24l01 transceiver modules for remotely controlling the vehicle.
Pin Layout
This is my initial layout for the micro-controller ports and component placement. I know I’ll end up changing something, but for now, I know everything will fit alright!
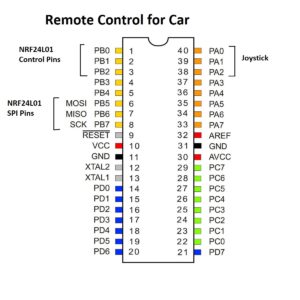
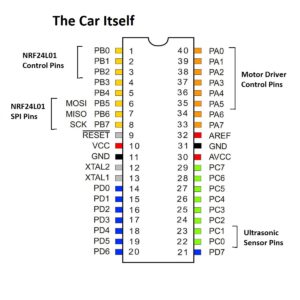
I’m new to image licensing, so I may be infringing on copy-write…but this is not my image. The original pinout image was found on Google Images and belongs to Protostack.
In Conclusion
I hope to be posting progress of my project at least every other day: whether it be code, breakthroughs in how to use a piece of hardware, or ideas to extend the project. I want to build the habit of documenting why I made decisions in my projects, as well as be able to look back fondly at this experience in a couple of years . If this documentation manages to help someone else, all the better!